Chapter 2. The processor
30
a r c h i t e c t u r e o p _ d c d r of o p _ d e c o d e r is
b e g i n
p r o c e s s ( op , s u b o p )
b e g i n
c a s e op (15 d o w n t o 10) is
w h e n " 0 0 0 0 0 0 " = > - - jmp
P C _ c o n t r o l _ s i g n a l s
<= " 1 0 " ;
A L U _ c o n t r o l _ s i g n a l s
<= "0 X X X X X X X X X X X X X X X X X X X ";
M U L T _ c o n t r o l _ s i g n a l s
<= "0 X X X X X X X ";
S H I F T _ c o n t r o l _ s i g n a l s
<= "0 X X X X X X X X ";
M I X _ c o n t r o l _ s i g n a l s
<= "0 X X X X X ";
F P U _ c o n t r o l _ s i g n a l s
<= "0 XXX ";
S I G N _ E X T _ c o n t r o l _ s i g n a l s
<= ’X ’;
D A T A _ M E M _ c o n t r o l _ s i g n a l s
<= " 0 0 0 0 0 0 0 0 " ;
R E G I S T E R _ F _ c o n t r o l _ s i g n a l s
<= " 0 0 " ;
P R E D I C A T E _ c o n t r o l _ s i g n a l s
<= " 0 0 0 " ;
R E G _ I N P U T _ c o n t r o l _ s i g n a l s
<= " 0 0 0 0 " ;
i l l e g a l
<= ’0 ’;
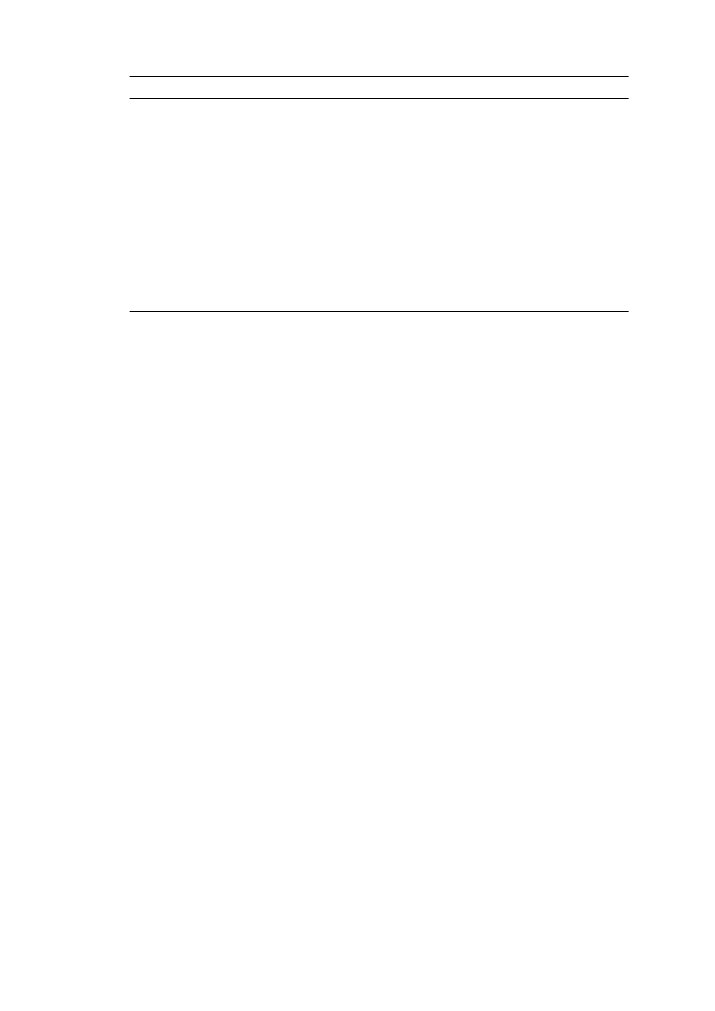
Figure 2.15: The ”jump” instruction decoding
• The predicate signals unit. Responsible for controlling the predicate file and
each signals.
• The stall unit. Responsible for the stall signals.
• The illegal flags unit. This unit produces the system flags that are sent to the
program to determine program flaws such us overflows and underflows.
• The Multiplexers unit. This unit controls all the multiplexers of the processor.
2.8.1
The operation decoder
This unit is responsible for decoding the instruction arriving from the instruction mem-
ory and dispatching the appropriate signals. This module is purely composed of combi-
national logic and the input and output ports can be seen at table
. The decoder is
a vast array of decoders and multiplexers. It’s a very simple circuit in the design but a
very extensive one. A future addition could be to be automatically generated by another
software program. The way it operates is the following. For every unique combination
of the operation and sub-operation it receives it produces the respective unique output
signals. Figure one shows a sample code for the ”jump” instruction. The MSB of ev-
ery output signal is the ”enable” signal, ’1’ for enabled ’0’ for disabled. Since only the
program counter is involved in the ”jump” instructions all the modules are disabled but
the PC. The rest of the bits are the control signals of each module which can be seen in