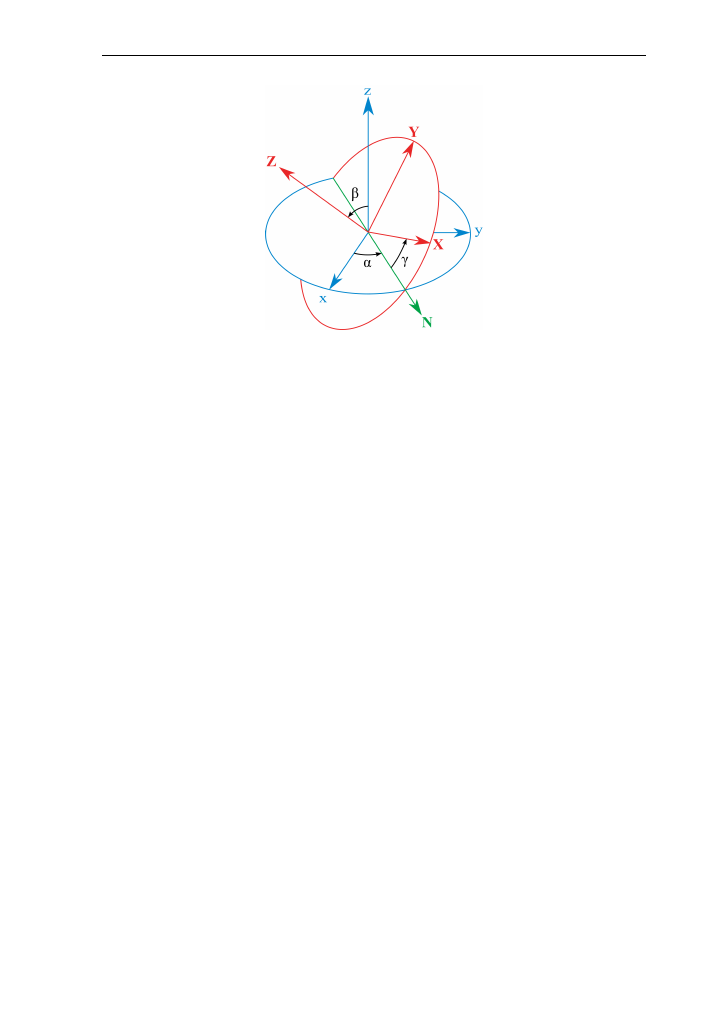
Εικόνα. 2.30: Ο προσανατολισμός του στερεωμένου στο σώμα συστήματος συντεταγμένων ως προς
το σταθερό στο χώρο σύστημα συντεταγμένων περιγράφεται από τρείς γωνίες
Ακολούθως θα αναλυθούν οι περιστροφές του καρπού του ρομπότ χρησιμοποιώ-
ντας την ακολουθία RPY
Ο άξονας X θεωρείται ότι είναι η μπροστινή κατεύθυνση του μηχανήματος. Ο
άξονας Ζ συνήθως προσανατολίζεται προς την ανοδική κατεύθυνση. Ωστόσο, με τα
αεροσκάφη ο άξονας Ζ συχνά βρίσκεται προς τα κάτω.
• Η περιστροφή γύρω από τον άξονα Χ ονομάζεται
roll
• Η περιστροφή γύρω από τον άξονα Υ ονομάζεται
pitch
• Η περιστροφή γύρω από τον άξονα Z ονομάζεται
yaw
Στην εικόνα 2.32 περιγράφεται ο προσανατολισμός με τη βοήθεια των γωνιών
RPY. Οι πρώτες δύο γωνίες θ1 (roll) και θ2 (pitch) είναι ίδιες με τις πρώτες δύο
γωνίες Euler, ενώ η τρίτη γωνία περιστροφής θ3 (yaw)είναι γύρω από τον τρέχοντα
άξονα z.
89