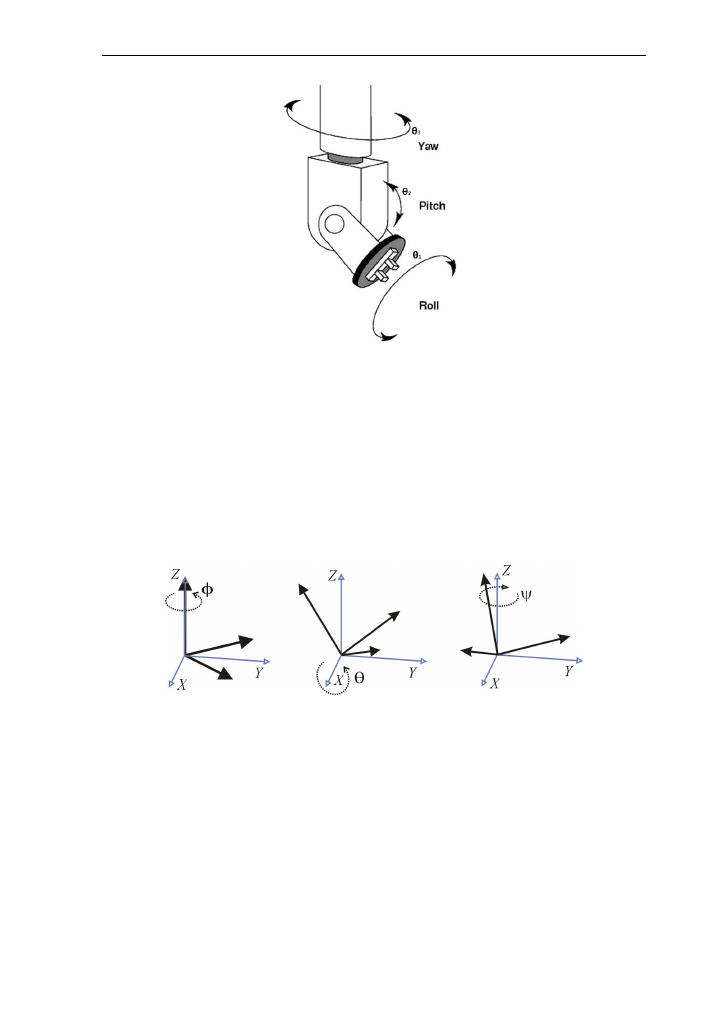
Εικόνα. 2.31: Γωνίες Roll Pitch Yaw
Ο προσανατολισμός στις δύο παραπάνω περιπτώσεις γίνεται με διαδοχικές περι-
στροφές ως προς τους νέους περιστραμμένους άξονες . Ωστόσο, ο προσανατολισμός
μπορεί να δοθεί και με διαδοχικές περιστροφές ως προς ένα σταθερό σύστημα, όπως
είναι στην περίπτωση του βιομηχανικού ρομπότ το σύστημα της βάσης.
Εικόνα. 2.32: Γωνίες Roll Pitch Yaw
2.6.5
Περιγραφή βραχίονα Niryo‐One
Ο ρομποτικός βραχίονας που χρησιμοποιήθηκε για τις ανάγκες τις παρούσας δι-
πλωματικής εργασίας είναι το Niryo-One της Γαλλικής εταιρείας Niryo [55]. Ο βρα-
χίονας βρίσκεται στο Εργαστήριο Ρομποτικής Ενσωματωμένων και Ολοκληρωμένων
Συστημάτων του τμήματος Ηλεκτρολόγων Μηχανικών και Μηχανικών Υπολογιστών
του Πανεπιστημίου Δυτικής Μακεδονίας με έδρα τη Κοζάνη. Το Niryo-One αποτελεί
90