Παράρτημα Δ – Η λειτουργία σερβοκινητήρων
Οι σερβοκινητήρες έχουν μια συχνότητα παλμού, συνήθως 50Hz, κατά την οποία
διαβάζουν την τάση εισόδου. Όταν θέλουμε να κουνήσουμε έναν σερβοκινητήρα πρέπει να
αλλάξουμε την τάση στα άκρα του, αυτή η διαδικασία γίνεται συνήθως με την χρήση
μεταβλητών αντιστάσεων, δημιουργώντας έτσι απώλειες. Η τεχνολογία PWM[27] μας
επιτρέπει να ελέγχουμε τους σερβοκινητήρες πιο αποτελεσματικά και με μεγαλύτερη ακρίβεια
μέσω παλμών. Οι παλμοί αυτοί έχουν ως ελάχιστη τιμή το 0 και ως μέγιστη την τιμή που
επιλέγουμε να παρέχουμε εμείς, συνήθως 3.3V ή 5V. Έπειτα μπορούμε να αλλάξουμε το
πλάτος του παλμού σε σχέση με τον παλμό του σερβοκινητήρα. Μας δίνεται έτσι η δυνατότητα
να επηρεάσουμε την μέση τάση που ο σερβοκινητήρας βλέπει στην είσοδο του και κατά
επέκταση την περιστροφή του.
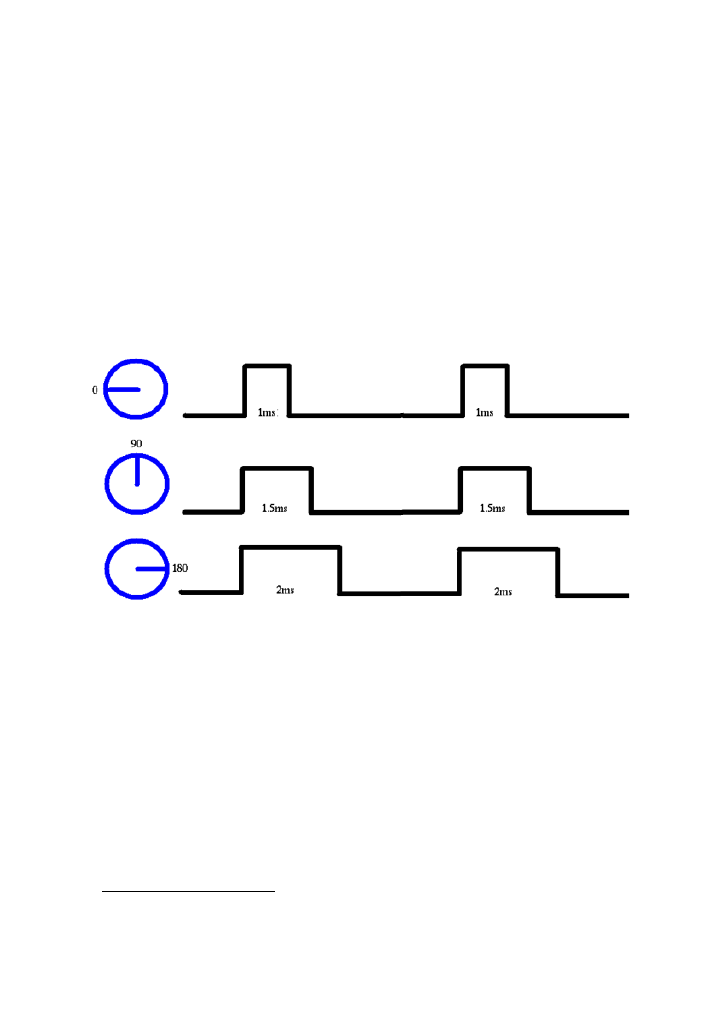
Οι περισσότεροι σερβοκινητήρες είναι προγραμματισμένοι έτσι ώστε ένας παλμός
διάρκειας 1ms να ισούται με 0
ο
, 1.5ms να ισούται με γωνία 90
ο
και 2ms με 180
ο
(Σχήμα 100
Η ανάλυση των 12 bit σημαίνει ότι η μονάδα μας προσφέρει 4096 τιμές μεταξύ του 1ms και
των 2ms ώστε να έχουμε μεγάλη ακρίβεια στην θέση περιστροφής του σερβοκινητήρα μας.
9
Η εικόνα προήλθε από: https://electronics.stackexchange.com/questions/346603/driving-servo-motor-with-
pwm-signal
Σχήμα 100: Η επιρροή του PWM στην γωνία του σερβοκινητήρα