απαρτίζεται από 4 διακριτά μέρη, την βάση, το χέρι, τον καρπό και την δαγκάνα.
Αναλυτικότερα:
Βάση: Κάνει χρήση ενός MG996R σερβοκινητήρα και είναι υπεύθυνη για την
περιστροφή του βραχίονα και κατά επέκταση της δαγκάνας στον κάθετο άξονα.
Χέρι: Χωρίζεται σε 2 κλειδώσεις, τον ώμο και τον αγκώνα. Ο ώμος ενώνεται με τον
αγκώνα μέσω ενός συνδέσμου και με τον ίδιο τρόπο ενώνεται ο αγκώνας με τον καρπό. Σε
αυτά τα άκρα έχουμε εγκαταστήσει άλλους 2 σερβοκινητήρες MG996R οι οποίοι είναι
υπεύθυνοι για το βάθος και το ύψος της δαγκάνας.
Καρπός: Ο καρπός αποτελείται από 2 μικρούς MG90S σερβοκινητήρες οι οποίοι είναι
υπεύθυνοι για την περιστροφή του καρπού και για την κάμψη του προς τα πάνω και προς τα
κάτω.
Δαγκάνα: Η δαγκάνα αποτελεί το τελευταίο κομμάτι του ρομποτικού βραχίονα και
συγκεκριμένα αυτό το οποίο αλληλοεπιδράει με το περιβάλλον. Είναι προσκολλημένη πάνω
στον καρπό και ελέγχεται από έναν μικρό σερβοκινητήρα MG90S. Για αυξημένη πρόσφυση με
το αντικείμενο που θέλουμε να πιάσουμε, κολλήσαμε στις άκρες της δαγκάνας κομμάτια από
λάστιχο.
3.3 Σύνοψη κεφαλαίου
Στο παρόν κεφάλαιο αναλύσαμε το υλικό των 2 διακριτών συστημάτων, την δομή του
ρομποτικού βραχίονα και τις συνδεσμολογίες που χρησιμοποιήσαμε για την επικοινωνία των
περιφερειακών μονάδων με τις κεντρικές μονάδες του κάθε συστήματος. Στο επόμενο
κεφάλαιο γίνεται μελέτη των σημαντικότερων συναρτήσεων του κώδικα των 2 αυτών
συστημάτων.
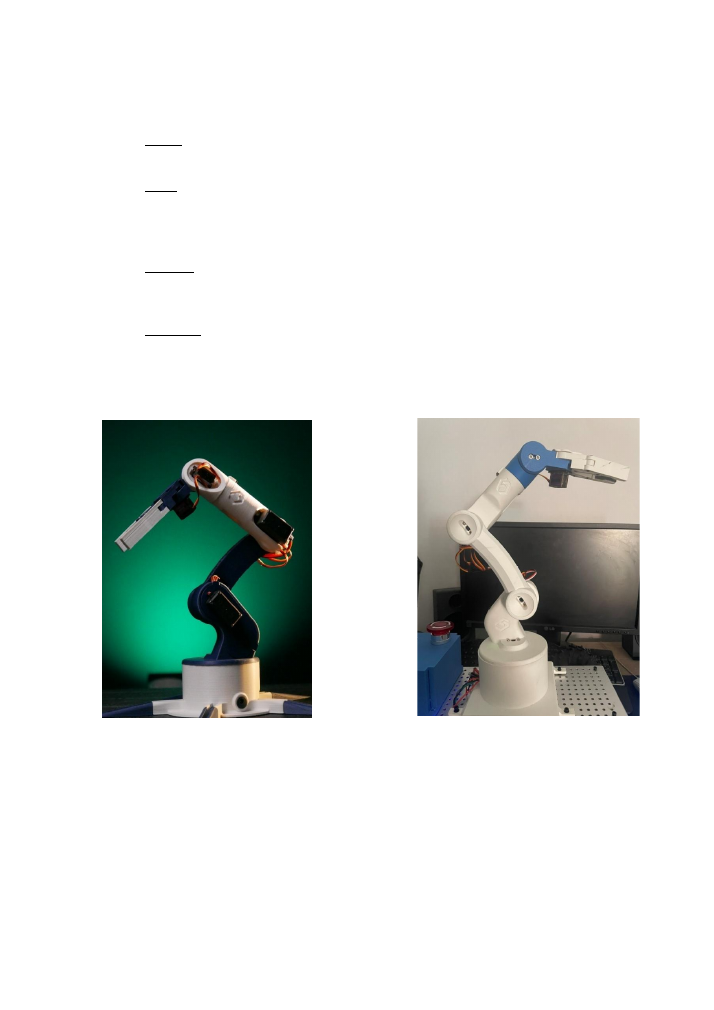
Σχήμα 68: Ο ρομποτικός βραχίονας που
αγοράσαμε
Σχήμα 67: Το τελικό αποτέλεσμα
εκτύπωσης του ρομποτικού βραχίονα