Σχεδιασμός και κατασκευή ενός υβριδικού αμυντικού αυτοματοποιημένου ρομποτικού συστήματος
192
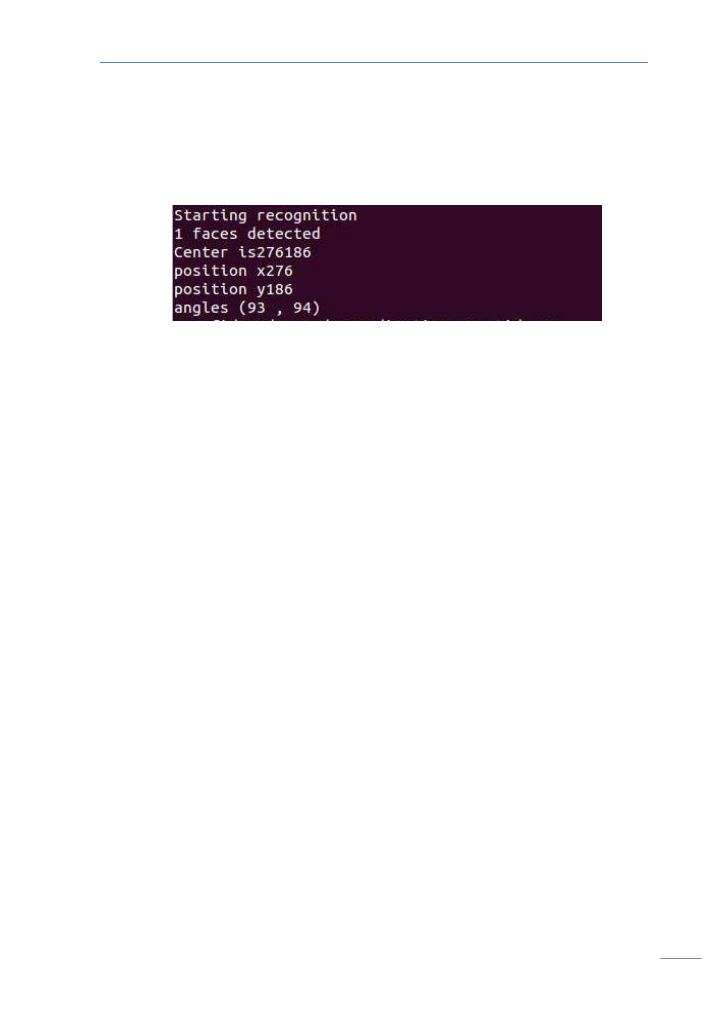
παρουσιάζεται στιγμιότυπο του προγράμματος στο οποίο φαίνεται πως το κέντρο του
προσώπου είναι στη θέση (276, 186) pixel και η μετατροπή του σε μοίρες είναι αντίστοιχα
(93, 94). Η προσαρμογή των pixel σε μοίρες γίνεται με βάση τη λογική που παρουσιάζεται
στο Σχήμα 7.
Εικόνα 97: Στιγμιότυπο προγράμματος στο οποίο παρουσιάζεται η θέση του κέντρου του προσώπου του ατόμου
(σε pixel) και η μετατροπή της θέσης αυτής σε μοίρες (το αποτέλεσμα angles).
Όπως αναφέρθηκε και παραπάνω η μετατροπή των pixel σε μοίρες απαιτεί να ληφθούν
υπόψη αρκετά χαρακτηριστικά, όπως το οπτικό πεδίο της κάμερας (οριζόντιο και κάθετο), τα
pixel στα οποία έχει επιλεγεί να λειτουργεί το πρόγραμμα (640x480 στην παρούσα εργασία).
Προτού γίνει η μετατροπή των pixel σε μοίρες, πρέπει το κέντρο του όπλου με εκείνο της
κάμερας (320, 240) να είναι κοινά. Επιλέξαμε το κέντρο του όπλου να δείχνει στις 90
ο
,
χωρίζοντας τόσο το οριζόντιο όσο και το κάθετο οπτικό πεδίο της κάμερας σε ίσα
διαστήματα. Η θέση της κάμερας πρέπει να είναι σταθερή, καθώς με την κίνηση της θα
μεταβάλλονται και οι συντεταγμένες με αποτέλεσμα να πρέπει να ακολουθηθεί μια
διαφορετική δομή αλγορίθμου.
Εφόσον έχει ολοκληρωθεί το κεντράρισμα μεταξύ όπλου και κάμερας, ξεκινά η ανάλυση
του αλγορίθμου που ακολουθείται για τη μετατροπή των pixel στις αντίστοιχες μοίρες.
Επειδή το όπλο είναι κεντραρισμένο στις 90
ο
, προκύπτει πως με το οπτικό πεδίο της κάμερας
να είναι ίσο με 58
ο
στον οριζόντιο άξονα και κέντρο τις 90
ο
, το όπλο θα έχει ελευθερία
κίνησης από 61
ο
έως 119
ο
. Στον κάθετο άξονα, το οπτικό πεδίο της κάμερας είναι 45
ο
,