21
εσωκλείει, επιτυγχάνει την παραγωγή περιοδικών ψηφιακών παλμών, μετατρέποντας
τα δεδομένα εισόδου, τα οποία αποτελούν σήματα συνεχούς τάσης, σε περιοδικά σή-
ματα. Συγκεκριμένα, ένας μεταβλητός αντιστάτης, επιτρέπει την εναλλαγή στη συ-
χνότητα των παραγόμενων περιοδικών σημάτων, επιτυγχάνοντας έτσι την κωδικοποί-
ηση (encoding)
13
των δεδομένων εισόδου.
Ο Πίνακας 3.1 παρουσιάζει τους ψηφιακούς παλμούς, των κωδικοποιημένων
σημάτων.
Ψηφιακός παλμός
Συχνότητα
Κύκλος λειτουργίας
W1
1 kHz
50%
W2
500 Hz
75%
Πίνακας 3.1: Ψηφιακοί παλμοί κωδικοποιημένων σημάτων.
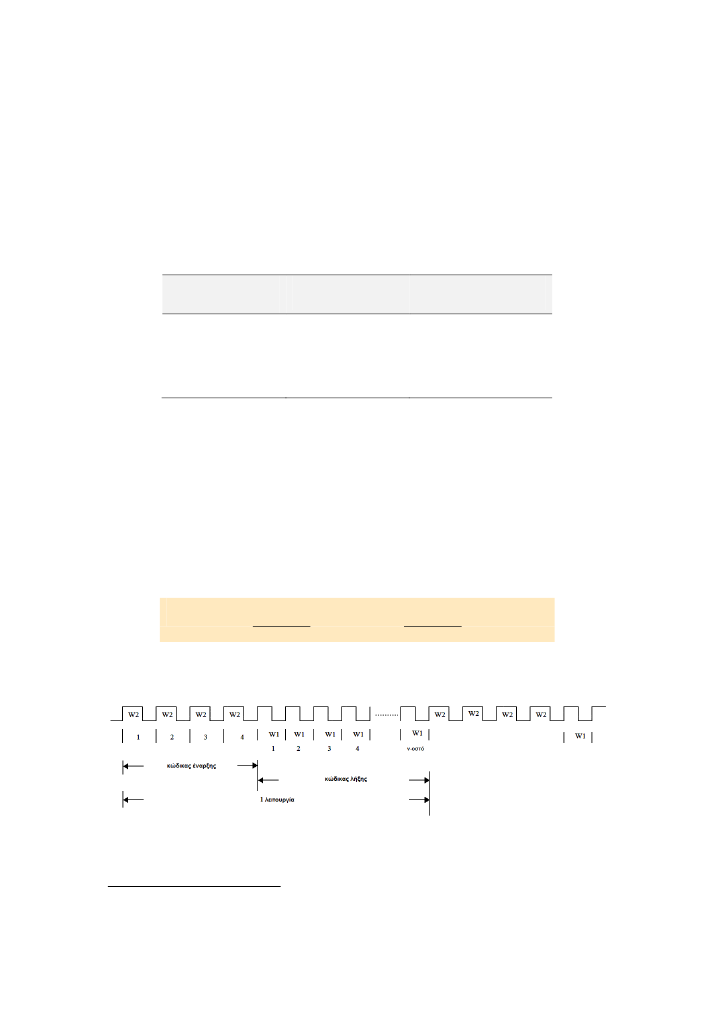
Διαφορετικός συνδυασμός των ψηφιακών παλμών
W1
και
W2
, συνεπάγεται της
διαφορετικής λειτουργίας του τηλεκατευθυνόμενου οχήματος. Το πλήθος των ψηφια-
κών παλμών
W1
καθορίζει τη λειτουργία που θα λάβει χώρα, ενώ οι ψηφιακοί παλμοί
W2
σηματοδοτούν την έναρξη της κάθε λειτουργίας (Εικόνα 3.4). Η ακολουθία των
ψηφιακών παλμών
W1
και
W2
, περιγράφεται από τη σχέση:
W2 W2 W2 W2 (n) x W1 W2 W2 W2 W2 (n) x W1 W2 W2 W2 W2
Εικόνα 3.4: Γραφική αναπαράσταση της μορφής κωδικοποιημένου σήματος.
13
Σύμφωνα με το φυλλάδιο προδιαγραφών (datasheet).