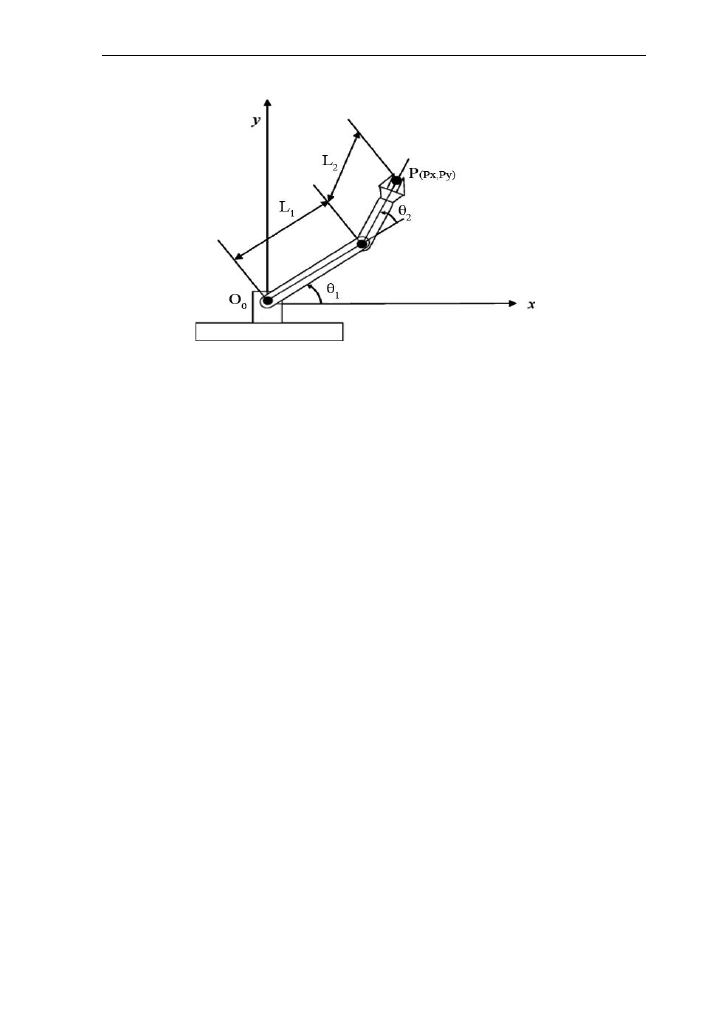
Εικόνα. 2.28: Σχηματική απεικόνιση βραχίονα 2 DOF
Συνεπώς, οι σχέσεις που προκύπτουν για την ευθεία κινηματική ανάλυση του
παραπάνω βραχίονα είναι οι εξής:
P
x
= L
1
cos θ
1
+L
2
cos (θ
1
+ θ
2
)
(2.13)
P
y
= L
1
sin θ
1
+L
2
sin (θ
1
+ θ
2
)
(2.14)
Σύμφωνα με όσα έχουν αναπτυχθεί παραπάνω, η δομή του βραχίονα περιλαμβά-
νει διαδοχικούς συνδέσμους συνδεδεμένους με αρθρώσεις από την βάση του έως το
τελικό εργαλείο δράσης του ρομπότ. Για την επίλυση του κινηματικού προβλήματος,
ένα από τα κύρια κινηματικά μοντέλα που χρησιμοποιείται είναι η μέθοδος Denavit
και Hartenberg [53]. Στο μοντέλο αυτό, γίνεται χρήση τεσσάρων παραμέτρων για
τον ορισμό του κινηματικού προβλήματος για ένα ρομπότ με n αρθρώσεις. Η εφαρ-
μογή ενός συστήματος συντεταγμένων για κάθε άρθρωση, καθορίζει τις D-H παρα-
μέτρους και εκτελείται ο αλγόριθμος που παρουσιάζεται παρακάτω. Η παραπάνω
διαδικασία, καταλήγει στον προσδιορισμό της θέσης και του προσανατολισμού του
τελικού εργαλείου δράσης ως προς το ακίνητο σύστημα συντεταγμένων.
84