2.6.3
Χώρος Εργασίας
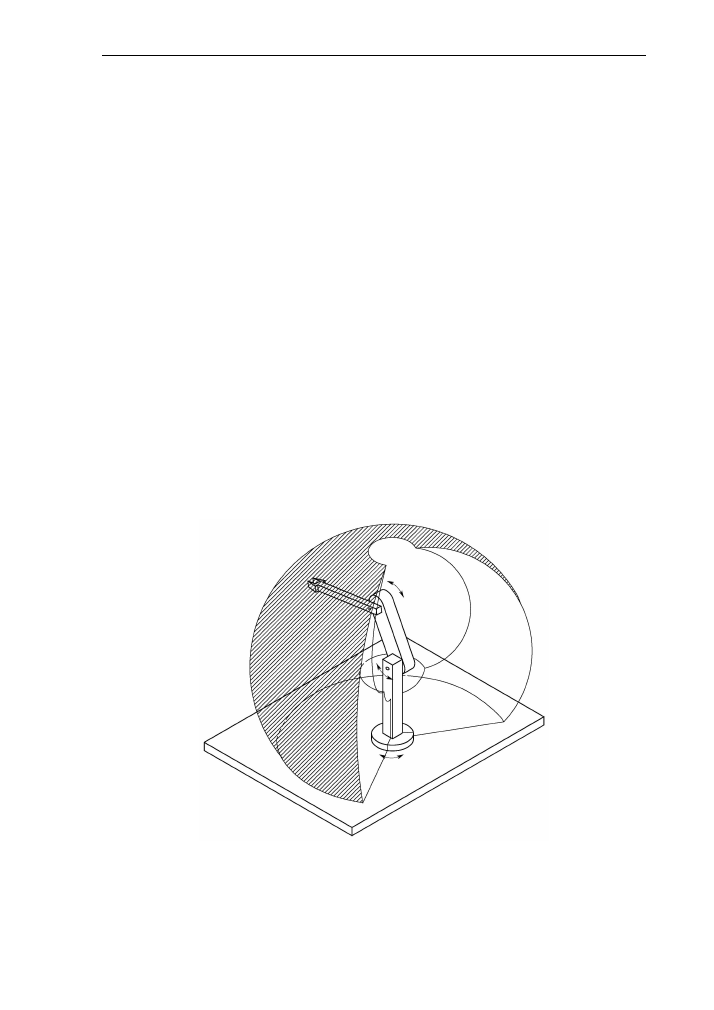
Ο χώρος εργασίας ενός χειριστή είναι ο συνολικός χώρος σάρωσης από το τε-
λικό εργαλείο δράσης καθώς ο χειριστής εκτελεί όλες τις δυνατές κινήσεις. Ο χώρος
εργασίας περιορίζεται από τη γεωμετρία του χειριστή τόσο όσο είναι οι μηχανι-
κοί περιορισμοί στις αρθρώσεις και το μέγεθος των συνδέσμων. Για παράδειγμα,
μια περιστροφική άρθρωση μπορεί να οριοθετεί σε λιγότερο από μια πλήρη κίνηση
360°. Επίσης, ο χώρος εργασίας ενός ρομπότ διακρίνεται στον προσβάσιμο και
στον επιδέξιο χώρο εργασίας. Προσβάσιμος χώρος εργασίας είναι ο χώρος όπου το
τελικό εργαλείο δράσης του βραχίονα μπορεί να έχει πρόσβαση κατά έναν τουλάχι-
στον προσανατολισμό της κινηματικής αλυσίδας. Ενώ ο επιδέξιος χώρος εργασίας,
είναι υποσύνολο του προσβάσιμου και αποτελεί το γεωμετρικό τόπο που είναι προ-
σβάσιμος από το τελικό εργαλείο δράσης, σε οποιοδήποτε σημείο της κινηματικής
αλυσίδας. Αξίζει να σημειωθεί ότι, ο επιδέξιος χώρος εργασίας υφίσταται μόνο σε
χειριστές από 3 βαθμούς κινητικότητας ή ελευθερίας και πάνω, οι οποίοι μπορούν
να έχουν διαφορετικούς προσανατολισμούς.
Εικόνα. 2.27: Σχηματική απεικόνιση χώρου εργασίας
82