Στη περιοχή της βάσης ενσωματώνεται η μονάδα ελέγχου και επεξεργασίας του
βραχίονα η οποία αποτελείται από το Raspberry Pi 3 και ενός επεκτάσιμου shield
που είναι υπεύθυνο για την οδήγηση των ενεργοποιητών.
Εικόνα. 2.35: Μονάδα ελέγχου και επεξεργασίας
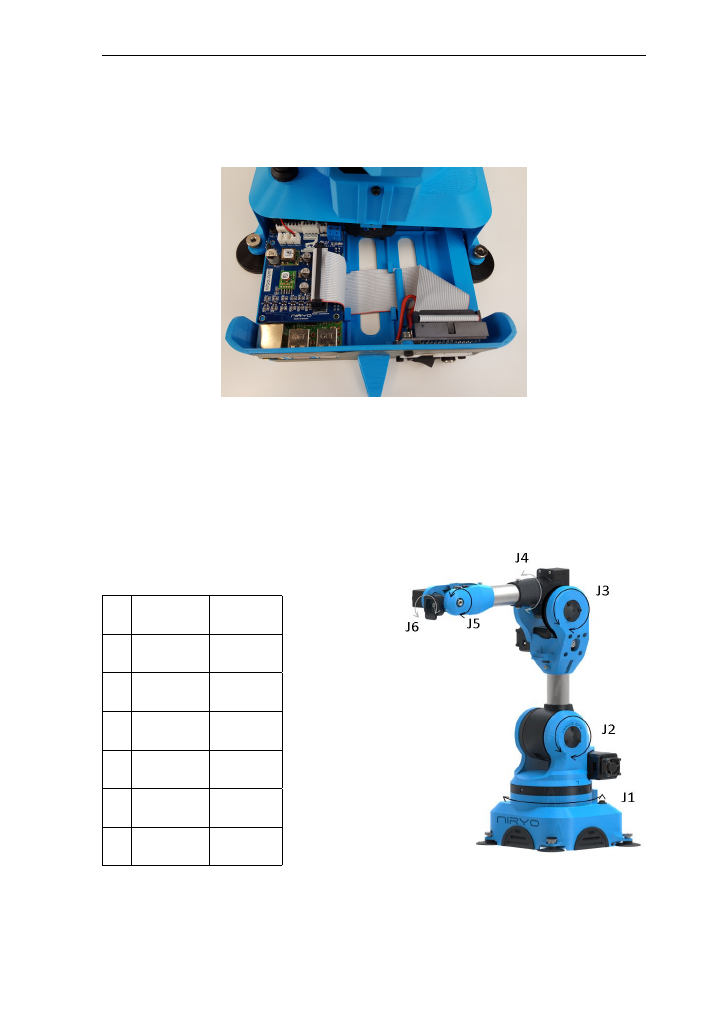
Για την κίνηση των αρθρώσεων χρησιμοποιούνται ειδικοί κινητήρες. Συγκεκρι-
μένα αποτελείται από 3 NiryoSteppers, 2 Dynamixel XL – 430 (σερβοκινητήρας) και
1 Dynamixel XL – 320 (σερβοκινητήρας).
Ελάχιστο
Μέγιστο
J1
-175
◦
175
◦
J2
-90
◦
36.7
◦
J3
-80
◦
90
◦
J4
-175
◦
175
◦
J5
-100
◦
110
◦
J6
-145
◦
147.5
◦
Εικόνα. 2.36: Σχηματική απεικόνιση περιστροφής
και ονοματοδοσίας αρθρώσεων
94