• q
i
= θ
i
για περιστροφική άρθρωση
• q
i
= d
i
για πρισματική άρθρωση
• a
i
και α
i
ορίζονται από τη γεωμετρία του συνδέσμου και είναι σταθερές
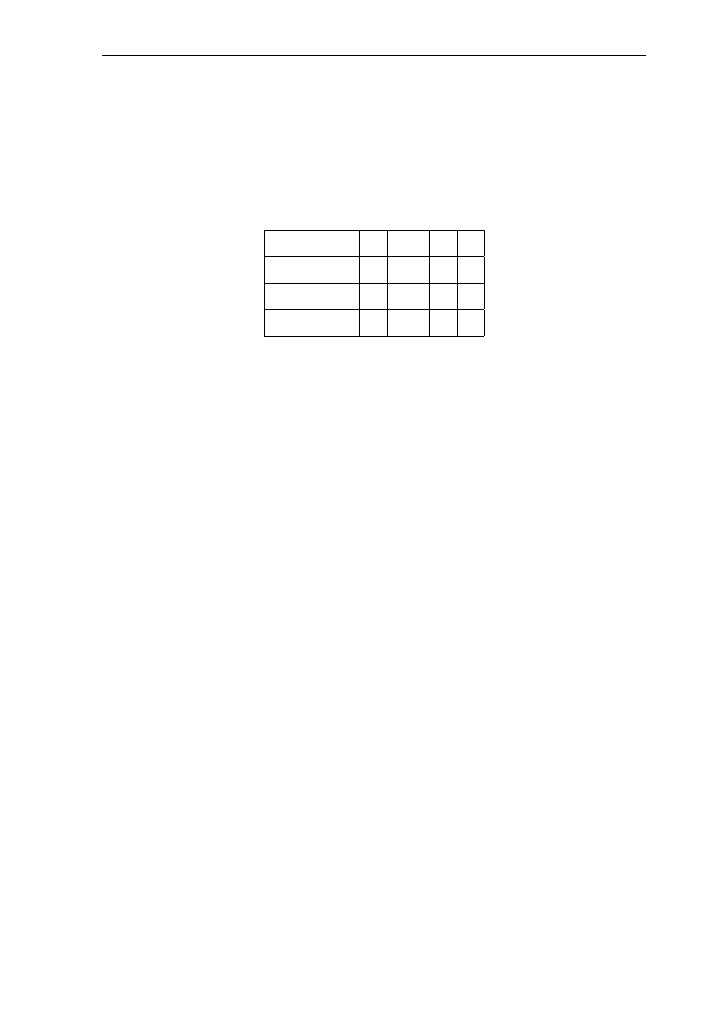
Σύνδεσμος i
a
i
α
i
d
i
θ
i
1
a
1
0
0
q
1
2
a
2
-90
◦
0
q
2
3
0
0
d
3
q
3
Αντίστροφο κινηματικό πρόβλημα
Στην ρομποτική όμως το βάρος πέφτει στην αντίστροφη κινηματική και όχι στην
ευθύγραμμη. To αντίστροφο κινηματικό πρόβλημα των σειριακών χειριστών μελετά-
ται για πολλές δεκαετίες και είναι απαραίτητο στον έλεγχο των χειριστών λόγο ότι
μας ενδιαφέρει να δίνουμε τη θέση και το προσανατολισμό του σημείου στο οποίο
θέλουμε να πάει το τελικό εργαλείο δράσης και να υπολογίζονται οι κλίσεις του
κάθε μέλους του βραχίονα Η επίλυση του αντίστροφου κινηματικού προβλήματος
είναι υπολογιστικά κοστοβόρα και γενικά απαιτείται αρκετός χρόνος στον έλεγχο
των χειριστών σε πραγματικό χρόνο. Αρχικά πρέπει να βρεθεί ο χώρος εργασίας,
δηλαδή να οριστούν τα όρια κλίσης του κάθε μέλους του βραχίονα για τη σωστή
λειτουργία του και στη συνέχεια να βρεθούν όλοι οι συνδυασμοί λύσεων. Ένας
βραχίονας έχει τη δυνατότητα να προσεγγίσει το τελικό σημείο με διαφορετικούς
συνδυασμούς και συνήθως όσο περισσότερα μέλη υπάρχουν τόσο περισσότεροι είναι
οι συνδυασμοί. Τέλος η σωστή επιλογή συνδυασμού ορίζεται από τον μηχανικό και
συνήθως επιλέγεται ο συνδυασμός που υλοποιείται με τη λιγότερη δυνατή κίνηση
του βραχίονα. Υπάρχουν δύο προσεγγίσεις λύσεων η γεωμετρική που χωρίζει το
βραχίονα σε μικρά γεωμετρικά σχήματα και προσπαθεί να βρει εξισώσεις σχετικά
με τις γωνίες των μελών του με τη βοήθεια τριγωνομετρίας και επιπεδομετρίας και
η αλγεβρική που μετασχηματίζει τις εξισώσεις της ευθύγραμμης κινηματικής με τέ-
τοιο τρόπο που να έχουμε σαν αγνώστους τις γωνίες των μελών του βραχίονα.
87